隨著新能源汽車的發展,需要傳輸的數據量也逐漸增加,很多車廠都在考慮使用CAN FD來替代CAN實現數據量傳輸的提速。那么如何穩定地升級到CAN FD呢?本文為您解答。
一
CAN FD與CAN的主要區別

圖1 CAN幀基本格式
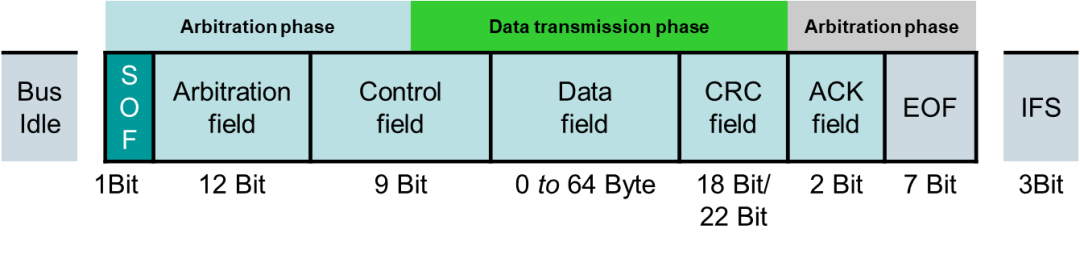
圖2 CAN FD幀基本格式
如圖1、圖2所示分別是CAN幀和CAN FD幀的基本格式,區別主要分為兩大點:
1、BRS(可變速率)
CAN FD的傳輸速率分為兩個頻段,從BRS位開始到CRC校驗之前這一段是可變速率段,這一段的波特率可以進行加速,理論最高可達到5Mbit/s,而其他位置則和CAN2.0一樣,最高速率可達到1Mbit/s。
2、數據場長度增加BRS
CAN FD對數據場的長度做了擴充,從CAN的8字節增加到CAN FD的64字節。如圖3所示,當DLC小于8字節時和CAN一樣是線性增長,當大于8字節時是非線性增長。
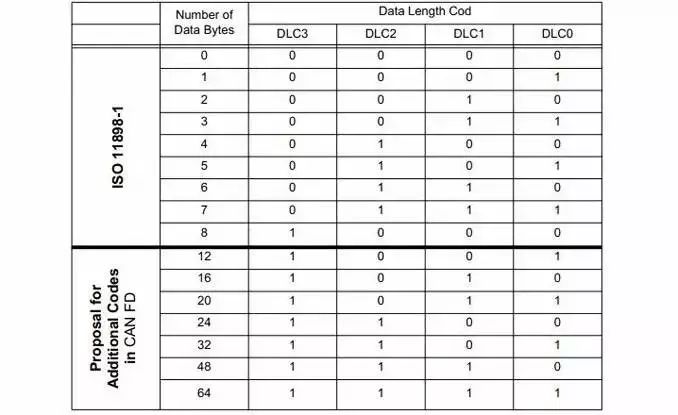
圖3 DLC編碼方式
二
CAN FD的升級與CAN是否有沖突?
由于使用CAN FD網絡時,需要ECU和CAN控制器、收發器均支持CAN FD通訊。所以當CAN網絡中某些節點升級為CAN FD時,車輛上CAN與CAN FD處于共存的情況,因為普通的CAN節點無法正常解析CAN FD報文,節點就會一直報錯,出現大量錯誤報文,導致總線通訊異常。
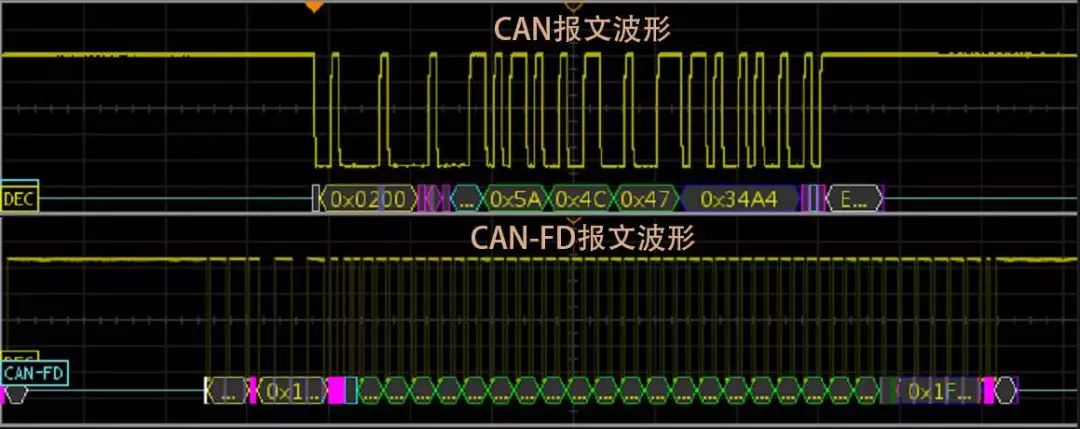
圖4 CAN與CAN FD報文的波形對比
如圖4所示,可以看到CAN FD的傳輸速率是5Mbit/s,而CAN的傳輸速率為500Kbit/s,我們在平常使用上位機軟件解析CAN報文的時候需要設置對應的波特率,否則報文就無法解析。那么用一種簡單的方式來理解,對于CAN節點來說,它的波特率是500K,那么5M的波特率與它不匹配,所以不能被正常解析,該節點就會報錯,導致CAN FD報文一直無法正常發送,干擾總線的正常運行。